RoboTUNN
Robotergestützte Bestandsaufnahme von U-Bahn-Tunneln zur Generierung digitaler Zwillinge und prädiktiver Instandhaltung
Zuletzt aktualisiert am 08.01.2025
Projektbeschreibung
Problem
Die langjährige Betriebsdauer deutscher U-Bahn-Tunnel erfordert eine erhöhte Inspektion der Bauwerksstruktur und des Leitungsverlaufs. Derzeit werden Inspektionen manuell durchgeführt und sind mit hohen Ressourceninvestitionen sowie Sicherheitsrisiken verbunden. Hinzu kommt eine heterogene und inkonsistente Datengrundlage. Die Herausforderung liegt in der autonomen Inspektion und der Schaffung konsistenter Digitaler Zwillinge (DZ) für das prädiktive Instandhaltungsmanagement.
Ziele
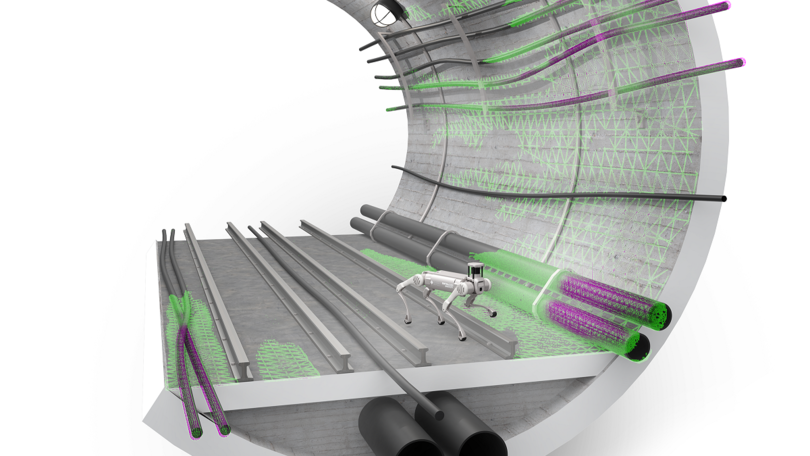
Das Projektziel besteht in der autonomen Bestandsaufnahme und Schadensdetektion von U-Bahn-Tunneln mittels mobiler Robotik und echtzeitfähiger Künstlicher Intelligenz (Echtzeit-KI) sowie in der Erstellung eines DZ, mit dem Ziel eines prädiktiven Instandhaltungsmanagements. Die Basis für die Entwicklung des DZs bilden Daten der digitalen Bestandsaufnahmen, aber auch Bestandsunterlagen und öffentlich zugängliche relevante Datenbanken sowie die Verlinkung der Datensätze.
Durchführung
Aufbauend auf einer Analyse des Status quo vorhandener Erhaltungsprozesse von U-Bahn-Anlagen – und der Analyse möglicher sowie relevanter Schadensarten – werden Anforderungen an das Gesamtsystem spezifiziert. Basierend auf der Analyse wird ein autonomes Robotersystem zur digitalen Bestandsaufnahme, zur Schadensdetektion sowie zur DZ-Generierung entwickelt. Das Gesamtsystem wird anschließend im Rahmen von mehreren Projektdemonstratoren erprobt und in einer Wirtschaftlichkeitsuntersuchung bewertet.