
Markus Mainka – stock.adobe.com
In Frankreich sind autonom fahrende U-Bahnen schon lange keine Seltenheit mehr. Bereits seit den 1980er Jahren ist in Lille eine vollautomatisierte Metro unterwegs. Seitdem sind mehrere französische Städte hinzugekommen. Sieht man von der „Skyline“ ab, die zwischen zwei Terminals am Flughafen Frankfurt/Main verkehrt, ist in Deutschland bisher nur eine autonome U-Bahn in Nürnberg in Betrieb. Städte wie Hamburg und Berlin wollen nachziehen. Daher forschen Projektkonsortien, die das Bundesministerium für Digitales und Verkehr (BMDV) im Rahmen der Innovationsinitiative mFUND fördert, auch an smarten Technologien, mit denen sich der fahrerlose Schienenverkehr zuverlässig auf den Straßenverkehr ausweiten lässt.
Effizienter, flexibler, sicherer
Autonome spurgeführte Systeme sind nicht nur effizienter, flexibler und sicherer, sondern gleichzeitig umweltverträglicher und komfortabler als fahrergebundene. Vorausschauendes Anfahren und Bremsen spart CO2-Emissionen ein und reduziert Verschleiß. Durch die hohe Verkehrssicherheit und das geringere Unfallrisiko kann der Fahrplan dichter getaktet werden. Je nach Fahrgastaufkommen lassen sich zusätzliche Züge kurzfristiger und schneller ins Netz einspeisen. Fahrermangel, Streiks und Personalausfälle führen nicht zu Zugausfällen. Mithilfe fahrerloser Schienenfahrzeuge ließen sich zudem viele Bahnnebenstrecken im ländlichen Raum wieder wirtschaftlich betreiben.
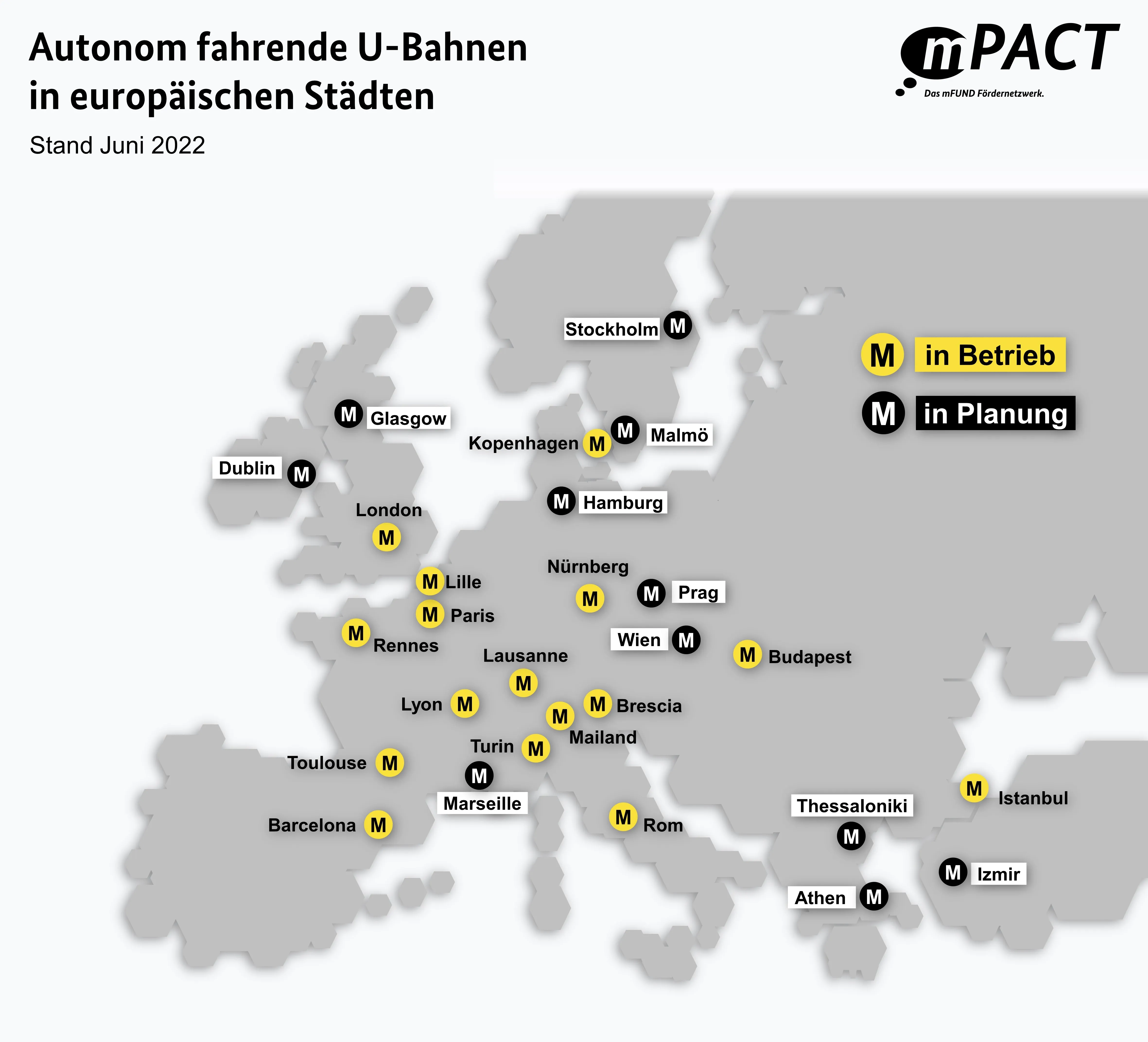
Bundesministerium für Digitales und Verkehr (BMDV) / Quelle: Allianz pro Schiene, Stand: 2022
Aufgrund des geschlossenen Tunnelsystems sind autonome U-Bahnen vergleichsweise einfach in Betrieb zu nehmen. Technisch anspruchsvoller wird es, sobald die Schienenfahrzeuge dieses geschlossene System verlassen und im Straßenverkehr unterwegs sind. Denn in offenen Umgebungen kreuzen nicht nur Autos, Radfahrende und Fußgehende den Gleisbereich. Auch widrige Witterungsverhältnisse wie Nebel, Schnee, Eis und Dunkelheit stellen höhere Anforderungen an die Umfelderfassung der Fahrzeuge.
KI beschleunigt automatisierte Umfelderfassung
Erfreulicherweise profitiert die sensorgestützte Umfelderfassung enorm von den rasanten Entwicklungsfortschritten KI-basierter Technologien. Insbesondere generative KI erkennt Hindernisse inzwischen nicht nur höchst zuverlässig, sondern lernt zudem permanent dazu.
Eine entsprechende KI-basierte Technologie zur Umfelderfassung entwickelt und erprobt das Forschungsteam des mFUND-Projekts RailAIxs. Dazu sammelt es zunächst Daten zu Gefährdungen, die möglicherweise im Gleisbereich auftreten könnten, und erstellt auf dieser Basis Computeranimationen und fotorealistische virtuelle Welten. Anhand von simulierten Fahrten in diesen virtuellen Umgebungen lernt die KI, Gefährdungen zu erkennen. Das Training soll sie in die Lage versetzen, die Bilder, die am Fahrzeug angebrachte Kameras später während der Fahrt erzeugen werden, permanent korrekt zu analysieren.
„Autonome Fahrzeuge bieten die Chance, den Schienenverkehr auf mehreren Ebenen wirtschaftlicher, umwelt- und kundenfreundlicher zu gestalten. Schlüsselkomponente ist dabei die datenbasierte Technologie der automatischen Umfelderfassung des Gleisbereichs. KI kann hierzu einen entscheidenden Beitrag leisten.“

Fabian O. Hampel
Institut für Schienenfahrzeuge und Transportsysteme der RWTH Aachen, mFUND-Projekt „RailAIxs“
Neben der Sensorik wird das RailAIxs-Team die Schienenfahrzeuge so umrüsten, dass sich die Antriebs- und Bremssysteme intelligent ansteuern lassen. Das Gesamtsystem soll schließlich die Fahrzeuge – je nach Interpretationsergebnis der Umfeldanalyse – beschleunigen oder abbremsen können. Nach umfangreichen Testungen des Systems sollen Zulassung und Markteinführung folgen.
Software-Entwicklung als Nadelöhr
Oftmals langwierig ist bei solchen Vorhaben die Entwicklung der Software sowie deren Implementierung und Testung. Daher arbeitete das Team des mFUND-Projekts DEFACTO an einer Methode, die diesen Prozess automatisieren und somit wesentlich beschleunigen sollte. Es entwickelte und dokumentierte dazu beispielhaft eine Software zur Umfeldüberwachung von Schienenfahrzeugen und ergänzten sie mit ebenfalls aufgezeichneten Daten aus dem realen Gleisumfeld einer Werksbahn.
Um das datenbasierte automatische Testen der Software zu erproben, erstellten sie eine sogenannte DevOps-Pipeline. Das ist eine Technologie, die die Software-Entwicklung (Development) und den (Probe-)Betrieb (Operation) automatisch miteinander verknüpft.
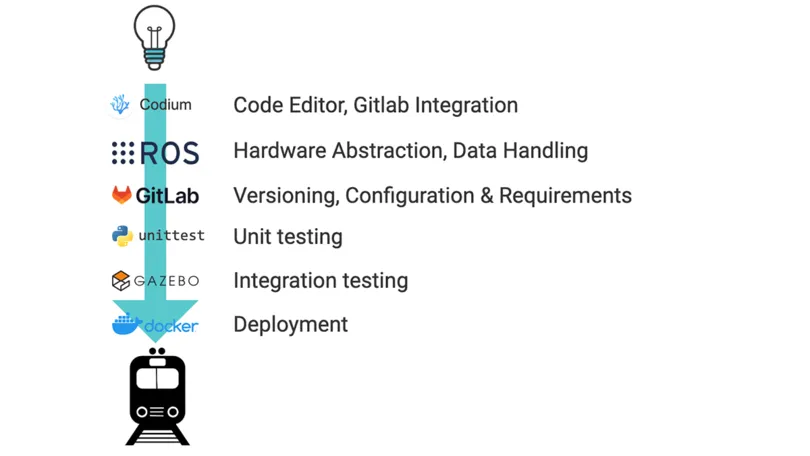
Mithilfe der Pipeline konnten die DEFACTO-Forschenden die Software automatisch auf das Fahrzeug übertragen und in einer Laborumgebung testen. Die Pipeline ermöglicht das Testen einzelner Module sowie der gesamten Automatisierungssoftware auf Basis des weitverbreiteten Robot Operation Systems (ROS). Das Programm lässt sich sowohl in einer simulierten Umgebung, als auch auf Basis von aufgezeichneten Sensordaten erproben. Die Technologie steht inzwischen als Open Source zur Verfügung.
Mehr Informationen zum Thema Autonomer Schienenverkehr