Von Inspektionsrobotern zur Infrastrukturüberwachung bis hin zu autonomen Lieferrobotern, die „letzte Meile“ überbrücken: Mobilitätsforschende haben das Potenzial von Servicerobotern längst entdeckt – und arbeiten stetig an zukunftsweisenden Anwendungen. Dabei haben die neuen technischen Entwicklungen der vergangenen Jahre der Robotik einen enormen Innovationsschub verliehen. Künstliche Intelligenz (KI) und neue Sensortechnologien ermöglichen Robotern nicht nur ein zunehmend autonomes Agieren in einer sich ständig verändernden Umgebung. Auch die Möglichkeiten, Umweltdaten mit speziellen Sensoren zu erfassen, verbessern sich kontinuierlich.
Professionelle Servicerobotik
Im Gegensatz zu Industrierobotern, die fest in Produktionslinien installiert sind, erbringen Serviceroboter verschiedenste Arten von Dienstleistungen. Daher müssen sie sich nicht nur selbständig bewegen können, sondern auch in der Lage sein, zu lernen, sich anzupassen und Fehler autonom zu korrigieren. Unterschieden werden dabei private und professionelle Serviceroboter.
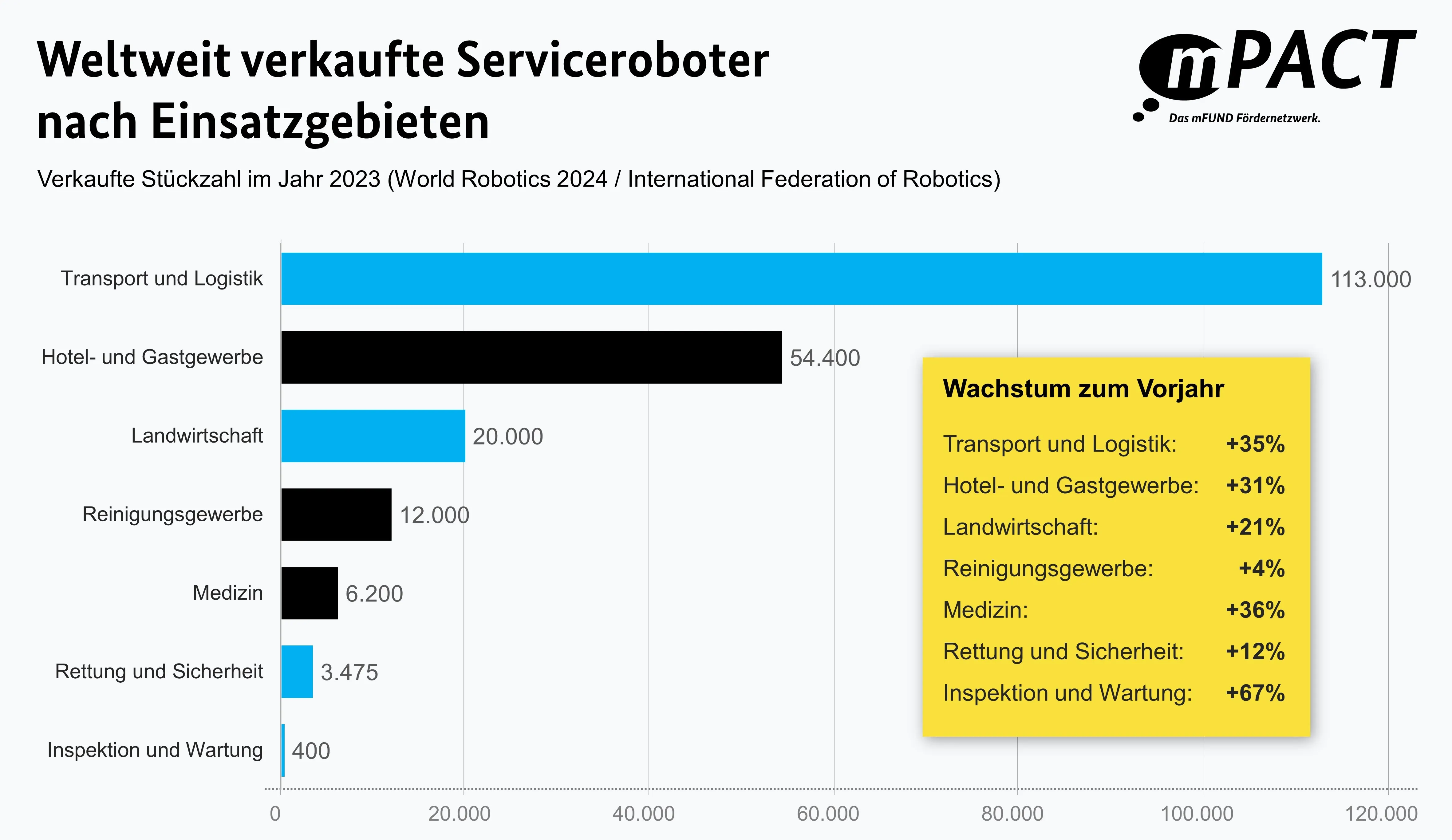
Im Bereich der professionellen Servicerobotik ist der Sektor „Logistik und Transport“ in den vergangenen Jahren am schnellsten gewachsen. Allein im Jahr 2023 wurden laut International Federation of Robotics (IFR) weltweit rund 113.000 Serviceroboter für den Bereich Transport und Logistik verkauft – und damit 35% mehr als noch im Vorjahr. Das Angebot und die verkaufte Stückzahl an Robotern, die Inspektions- und Wartungsaufgaben autonom durchführen, ist hingegen noch relativ gering, auch wenn die Wachstumsrate hier zuletzt bei 67 Prozent lag.
Bildnachweis: International Federation of Robotics, 2024 (eigene Darstellung)
Zu den professionellen Servicerobotern zählen zum Beispiel autonome mobile Inspektionsroboter. Dieses können Inspektions- und Wartungsaufgaben selbst unter widrigen Bedingungen und an für Menschen gefährlichen Orten übernehmen. Mit der entsprechenden Software und Sensorik ausgerüstet sind sie in der Lage, vordefinierte Inspektionsroutinen komplett eigenständig durchzuführen, Daten zu sammeln und diese mithilfe von KI und maschinellem Lernen in Echtzeit auszuwerten. Die automatisierte und reproduzierbare Inspektion sorgt für gleichbleibende Qualität der Ergebnisse und hohe Prozesseffizienz. Gleichzeitig gelten Inspektionsroboter als kosteneffizientere Inspektionsalternative, weil die zu inspizierende Fläche nicht mit zahlreichen Messpunkten und Sensoren ausgerüstet werden muss, sondern von einem einzigen „mobilen Sensorik-Zentrum“ abgefahren werden kann. Insbesondere im Bereich der Infrastrukturüberwachung sollen Serviceroboter aufgrund ihres großen Potenzials in Zukunft häufiger zum Einsatz kommen.
Inspektionsroboter zur Schadendetektion in U-Bahn-Tunneln
Die Forschenden des mFUND-Projekts RoboTUNN testen derzeit den Einsatz von Inspektionsrobotern in U-Bahn-Tunneln. Denn: U-Bahn-Tunnel müssen kontinuierlich überwacht und häufig inspiziert werden, um deren strukturelle Integrität und Funktionalität sicherzustellen und Bauwerksschäden frühzeitig zu detektieren. Aktuell werden U-Bahn-Tunnel noch manuell von Menschen inspiziert. Das ist nicht nur zeitaufwändig, ressourcenintensiv und risikobehaftet, es ist auch anfällig für Ungenauigkeiten.
Im Gegensatz zur herkömmlichen manuellen Inspektion kann der Roboter eigenständig homogene und konsistente Daten zum aktuellen Zustand der Tunnel-Infrastruktur aufnehmen. Dabei erkennt eine echtzeitfähige KI, die im Vorfeld mit Schadensarten trainiert wurde, relevante Schadensbilder. Die Forschenden kombinieren die so erhobenen Daten mit Bestandsunterlagen und öffentlich zugängliche Datenbanken, um auf dieser Basis einen digitalen Zwilling des Tunnels zu erstellen. Der Zwilling bildet dabei nicht nur den aktuellen Zustand der Tunnelanlage präzise ab, er dient auch als Grundlage für die vorausschauende Wartung.
„Autonome mobile Inspektionsroboter könnten in Kombination mit digitalen Zwillingen die Art und Weise, wie Tunnelanlagen gewartet und überwacht werden, grundlegend verändern und den Weg für sicherere und effizientere Prozesse ebnen.“

Larissa Zeichhardt
LAT Funkanlagen-Service GmbH, mFUND-Projekt „RoboTUNN“
Ein weiteres Einsatzgebiet von Servicerobotern mit großen Anwendungspotenzialen ist die Logistik- und Transportbranche. Mithilfe von Sensorik, Kameras und KI können Lieferroboter nicht nur die kürzeste Route auswählen und sich dabei selbständig fortbewegen, sondern auch Hindernissen automatisch ausweichen, Güter und Pakete erkennen – und diese an ein definiertes Ziel bringen. Vor allem bei der Überbrückung der sogenannten „letzten Meile“ können Lieferroboter ihr ökonomisches und ökologisches Potenzial gegenüber herkömmlichen Transportfahrzeugen entfalten: So können sie verschiedenste Transportgüter wie Pakete, Essensbestellungen, Einkäufe oder Medikamente auch auf Fuß- und Radwegen zur Empfangsadresse liefern. Selbst bei unüberwindbaren Hindernissen lassen sich fernüberwachte Lieferroboter über einen Operator sicher aus der unvorhergesehenen Situationen herausnavigieren.
Lieferrobotik auf dem Land
Bislang werden Lieferroboter vor allem in urbanen Anwendungsszenarien mit einer homogenen Verkehrsinfrastruktur, hoher Konsumentendichte und technikaffinen Kundinnen und Kunden getestet. Die Forschenden des mFUND-Projekts Lieferroboter-3L untersuchen hingegen, ob ein solcher Lieferroboter in Zukunft auch auf dem Land zum Einsatz kommen kann. Um repräsentative Aussagen ableiten zu können, wählen sie dafür Standorte, die unterschiedliche Umgebungsparameter hinsichtlich Netzabdeckung, Erreichbarkeit der Wohngebäude und Bevölkerungsstruktur aufweisen.

Die Forschenden berücksichtigen dabei nicht nur betriebswirtschaftliche Voraussetzungen für den Einsatz von Lieferrobotern, sondern auch deren soziale Akzeptanz sowie die aktuellen Entwicklungen der Rechtslage für autonome Systeme. Darüber hinaus evaluiert das Entwicklerteam auch technische Lösungsansätze – wie etwa die Mitnahme mehrerer Lieferungen pro Fahrt oder temperierte Lieferungen.
Auch wenn es noch ein weiter Weg ist, bis Serviceroboter flächendeckendend zum Einsatz kommen können: Die vielen mFUND-Projekte beweisen deren großes Potenzial für die Mobilitätsforschung.

