RUDI
Nutzung eines autonomen Roboters zur Inspektion von Straßengräben
Zuletzt aktualisiert am 07.04.2025
Projektbeschreibung
Problem
Angesichts des Klimawandels, der zu veränderten Niederschlagsmustern führt, geraten die bestehenden Entwässerungssysteme zunehmend unter Druck. Der Zustand und die Beschaffenheit dieser Systeme werden derzeit visuell inspiziert, was arbeitsintensiv ist und nicht immer vollständige Daten liefert. Um die Wartungsarbeiten effizienter und proaktiver zu gestalten, besteht ein zunehmender Bedarf an autonomen, datengestützten Lösungen, die Fehler präzise erkennen können.
Ziele
Ziel dieser Machbarkeitsstudie ist es, einen digitalen Zwilling zu entwickeln, der den Inspektionsprozess automatisiert. Dieser dient als Entscheidungsgrundlage für geplante Instandhaltungsarbeiten und kann Probleme in Straßengräben durch datengestützte Ansätze präzise lokalisieren. Um die dafür erforderlichen genauen Daten zu sammeln, wird eine flexible und autonome Datenerfassungsplattform entwickelt. Darüber hinaus werden KI-Algorithmen erstellt, die eine automatische Verarbeitung dieser Daten ermöglichen. Im Rahmen dieses Projekts wird ein innovativer Datensatz aus Bildern des Straßengrabensystems und Punktwolken erstellt, der geometrische 3D-Informationen erfasst und die Gräben im Raum darstellt. Mit diesen verarbeiteten Daten können Verstopfungen, Schäden, Vegetation und Wasserstände in den Straßengräben identifiziert werden.
Durchführung
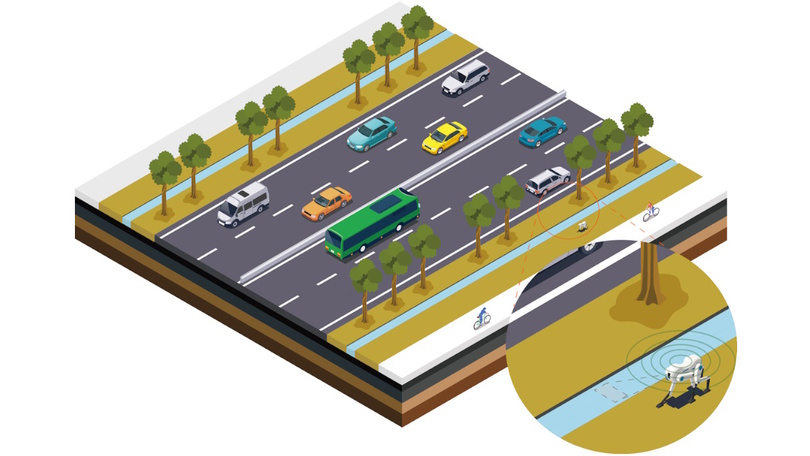
Ein mit einer Kamera, einem Lidar, Tiefen- und Wärmekameras ausgestatteter Roboter wird so programmiert, dass er autonom durch Straßengräben navigiert und Rohdaten sammelt. Es werden KI-Algorithmen entwickelt, um diese Daten zu analysieren, indem die Bilder in verschiedene Kategorien unterteilt werden, z. B. zur Identifikation von Hindernissen oder Objekten, die den Wasserfluss in den Entwässerungssystemen blockieren könnten. Dieser Prozess, der als semantische Segmentierung bezeichnet wird, hilft der KI, verschiedene Teile der Szene zu verstehen und zu klassifizieren. Zudem werden die geometrischen 3D-Informationen der Kanalisation aus den Punktwolken verwendet, um die Wasserdurchflusskapazität zu schätzen. Die verarbeiteten Daten werden dann mit vorhandenen Karten, Wetterinformationen und Wasserflussmodellen kombiniert, um einen digitalen Zwilling der Straßengräben zu erstellen und potenzielle Entwässerungsprobleme zu erkennen. Die entwickelten Ansätze werden im Labor und in realen Straßengräben getestet, die in Zusammenarbeit mit Straßen.NRW und Hochtief in Nordrhein-Westfalen anhand spezifischer Entwässerungsprobleme und Herausforderungen ausgewählt wurden, um sicherzustellen, dass die Ansätze effektiv funktionieren.